
Baines, R. , S. K. Patiballa, J. Booth, L. Ramirez, T. Sipple, A. Garcia, F. Fish & R. Kramer-Bottiglio (2022): Multi-environment robotic transitions through adaptive morphogenesis. – Nature 610(7931): 283-289.
Ein für verschiedenste Umweltbedingungen angepasster Roboter entwickelt durch adaptive Morphogenese.
DOI: 10.1038/s41586-022-05188-w ➚

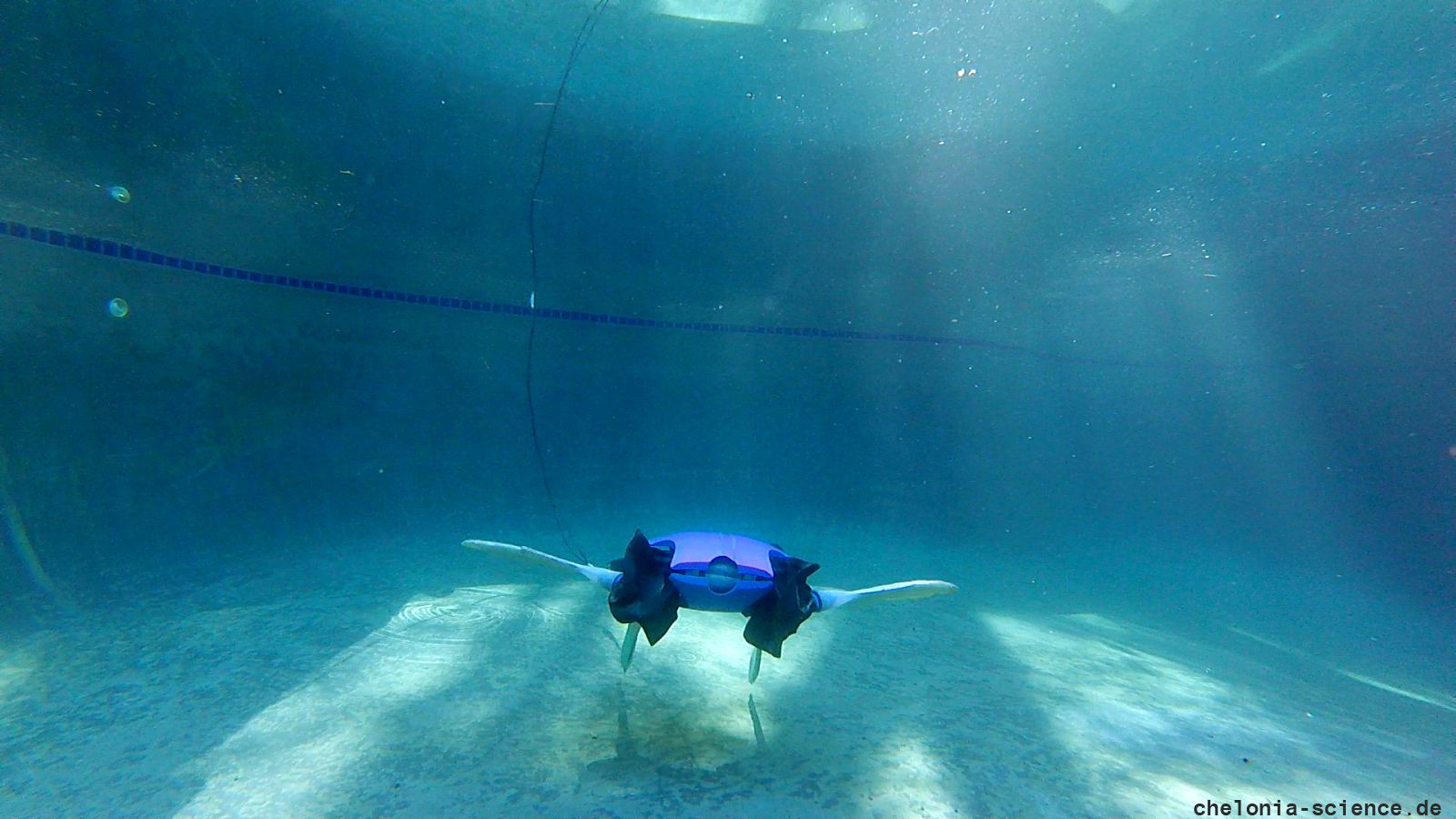
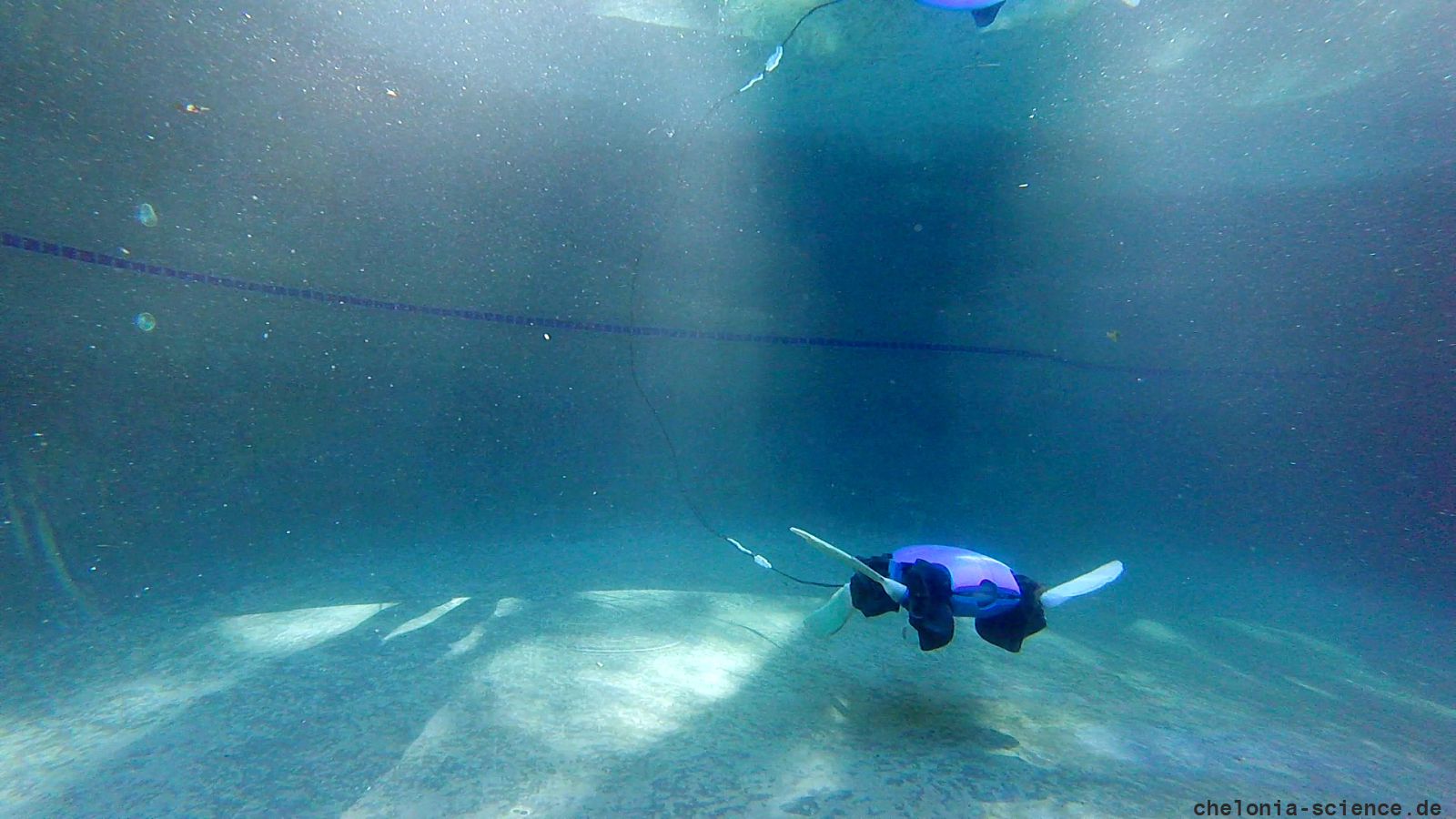
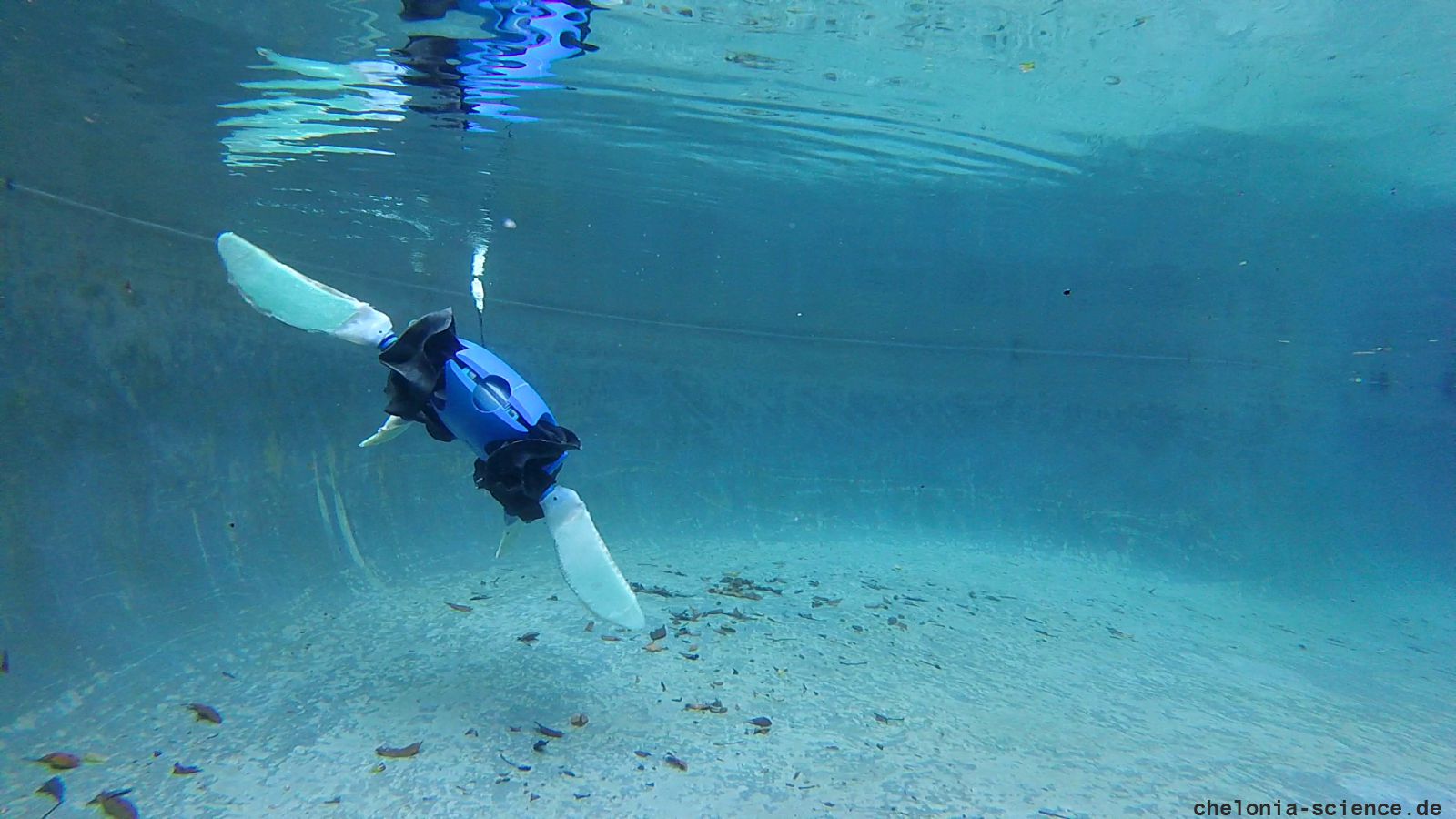
der Adaptiven Morphogenese,
inspiriert von Wasser- und Landschildkröten
© Rebecca Kramer-Bottiglio
Die derzeitige Nutzung von mobilen Robotern reicht von der ökologischen Datenerfassung über das Warenhausmanagement bis hin zur Untersuchung extremer Umweltsituationen und zur Anwendung im individuellen Haushalten. Diese sich ausweitenden Anwendungen benötigen zunehmend Roboter die in der Lage sind sich den verschiedensten Umgebungsbedingungen anzupassen. Diese Anpassungsleistungen stellen eine substantielle Herausforderung an das strategische Design dar und solche Designstrategien wurden bislang noch nicht effektiv genug adressiert. Zum Beispiel ein biomimetisches Design welches die Morphologie von Tieren, deren Fortbewegungsmechanismen sowie deren Gangart in einem einzigen Ansatz verfolgt beinhaltet oft den Verlust von Vorteilen speziell technisierter Materialien und Mechanismen die dazu geeignet sind mehr zu leisten als das tierische Vorbild. Andere Versuchsansätze nutzen einzigartige Fortbewegungsmechanismen für ganz bestimmte Umweltbedingungen was ein energiesparendes Design ermöglichen kann. Insgesamt kann man aber sagen, dass die vorherrschenden Roboterdesignstrategien unveränderliche, festgelegte Strukturen und Verhaltenseigenschaften favorisieren was dazu führt, dass sie meist nicht unter allen (verschiedensten) Umgebungsbedingungen einsetzbar sind. Hier nutzten wir den Einsatz der “Adaptiven Morphogenese” um verschiedenste Fortbewegungsmöglichkeiten für die verschiedensten Umweltbedingungen (terrestrisch, aquatisch und allen Übergängen dazwischen) zu realisieren. Dabei handelt es sich um eine Designstrategie bei der eine anpassungsfähige (adaptive) Robotermorphologie sowie Verhalten durch eine Vereinheitlichung von Struktur- und Antriebssystemen erreicht wird. Dazu ließen wir uns von Land- und Wasserschildkröten inspirieren und bauten einen Roboter der sowohl traditionelle harte und starre Komponenten sowie auch weiche Materialien zusammenführt, um damit eine radikale Veränderbarkeit der Beine und der Fortbewegungsarten zu erreichen, die dazu geeignet sind den Roboter unter verschiedensten Umweltbedingungen einzusetzen und sich fortbewegen zu lassen. Dieses Zusammenspiel von Fortbewegungsarten, Beinform und Umweltmedien lieferte essentielle Parameter die die Transportkosten (Transportenergieverbrauch) des Roboters bestimmten. Die damit erzielten Ergebnisse attestieren, dass die Adaptive-Morphogenese als eine wichtige Methode anzusehen ist, um damit die Effizienz von mobilen Robotern dahingehend zu verbessern damit sie sich neuen unbekannten und sich verändernden Umweltbedingungen anpassen können.
Kommentar von H.-J. Bidmon
Ein schönes Beispiel dafür wie auch das Roboterdesign von der Natur und Schildkröten lernen kann. Was aber die dabei festgestellten energetischen Parameter auch erkennen lassen können ist wie effizient sich Schildkröten trotz ihrer Panzer fortbewegen können. Das hat es ihnen vielleicht auch mit ermöglicht die Zeiten zu überdauern die z. B. dazu beitrugen, dass die Dinosaurier aussterben mussten. Insofern sollten wir uns zumindest bemühen diese Tiere zu erhalten, denn es wäre schade, wenn wir uns irgendwann nur noch beim Betrachten von Robotern an sie erinnern könnten. Die Orginalarbeit enthält auch Abbildungen von echten Schildkröten an denen die Maße für den Nachbau entnommen wurden. Wie die Bilder zeigen ist dieser Roboter an Land, im Wasser und im Schnee einsetzbar.
Galerien





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Roboter